|
|
||||
| Arms |
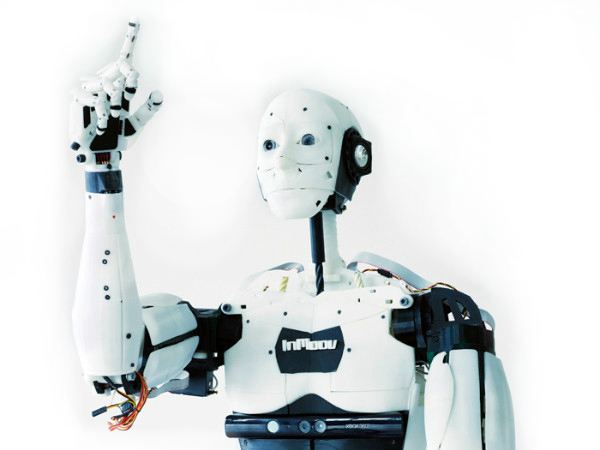
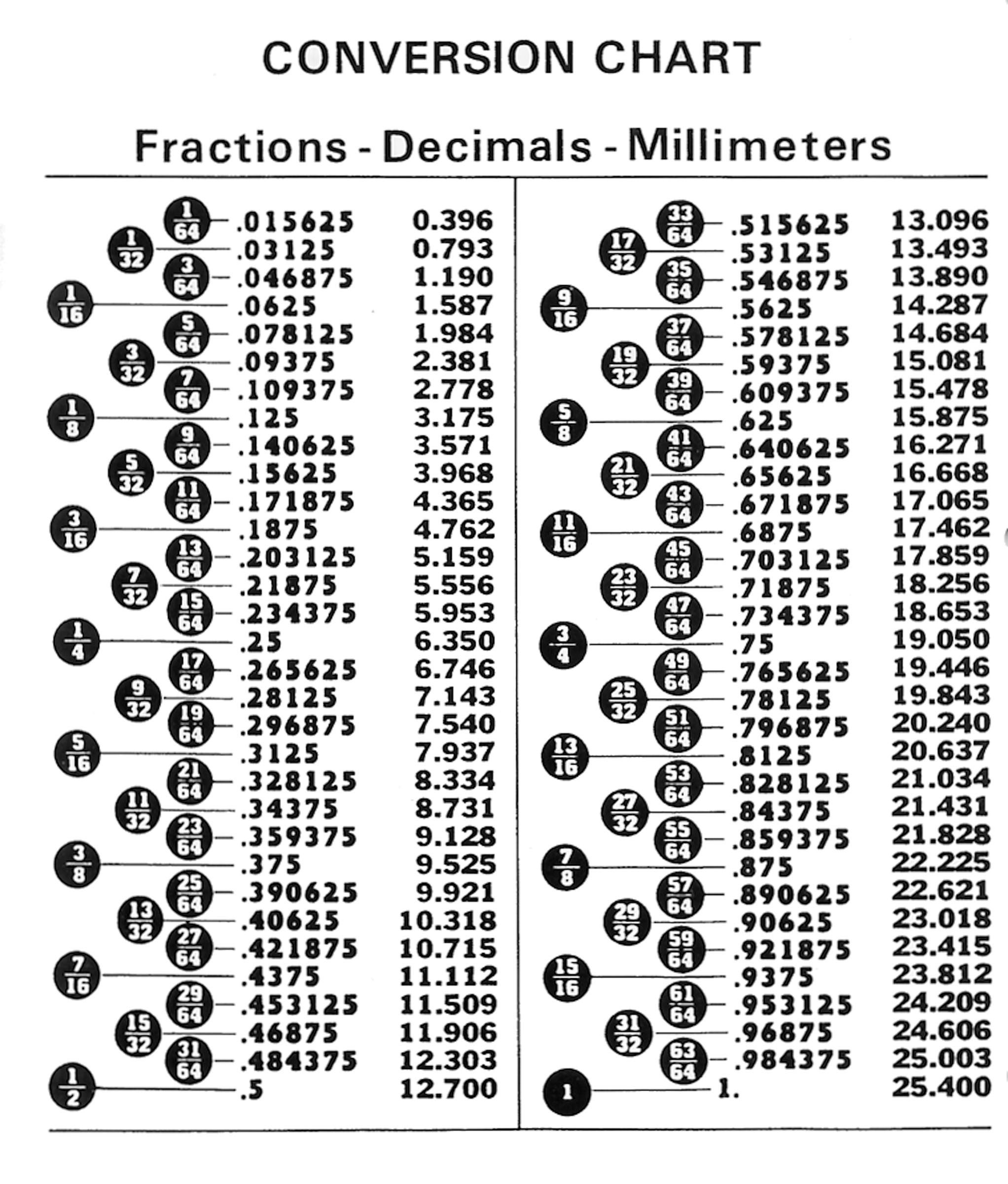
Photo by Gael Langevin CC-BY-NC Fig. 1 May, 2015. Having been down the road a bit with 3D printers, I saw that Gael Langevin in France started designing a 3D printable robot build in 2012, and is sharing the model files and sources to it. His InMoov, shown in Figure 1, is a full size humanoid robot with lots of articulation - enough to be quite expressive. It can be used in conjunction with open source software for control, which uses separate single board microcontrollers (SBMs) to control each arm, the neck and torso, and head, etc. and has them talk together, as well as teach/learn new actions. This is going to be a lot of fun! Thanks to Gael, all of his original designs are already out there on Thingiverse, just search there for "InMoov" to see what is available. You will also see there are already variations on his designs to choose from. Any variations from Gael's original designs that I use will be mentioned. Any original parts for this build will also be freely available. Choosing to do things a bit differently is not a criticism of Gael in any way - we owe him a huge debt for all the work he has graciously shared with us. The beauty of an open source design is that each of us can modify (mutate) the design a bit, making it get better and better. A brief note about units - Gael is in France, which adopted the metric system long ago. I enjoy the metric (SI) system, having been taught it quite some time ago (here it was called the MKS system then) and since I have little natural affinity for fractions, I am well aware of its advantages and have used it on many other projects. As a practical matter, however, most of the materials and many of the tools available to me here (St. Louis, Missouri) are sized in Imperial units. If I use an 8-32 bolt instead of a 4mm bolt, it is not a political statement, it was just what was handy. Conversion is a simple matter - if you don't like arithmetic get yourself a decimal equivalent chart with metric on it. Being able to use both sets of units is just more flexible for everyone. Also, the reprap 3D printer community likes to think of their printers as self-replicating, yet they incorporate many essential components that are not 3D printable, like coils, motors, integrated circuits, as well as smaller nuts and bolts. These non-printable parts are called "vitamins." I plan on using vitamins for my InMoov whenever I feel a better part can be had by using a part fabricated by methods or materials that are not a part of 3D printing. I realize that Gael's goal was to design a 3D printable robot as much as possible, and that is admirable, but if there is a better or more practical solution using off the shelf materials, I will probably make use of it and if so, document it here. Just to keep things straight, the original designs by Gael I will call the nominal design, and any other derived part designs used will be called a variation. I will also try to be specific about the parts I am using and if they are hard to find, I will also provide their source. For all you 3d printers out there, I will be using a .4mm nozzle with 1.75 PLA sliced with Simplify3D on a .2mm layer height unless otherwise noted. Two notes about this website - there will be alot of additions and changes to this website for the forseeable future, so if you are on a returning visit, you may have to refresh your browser on these pages in order to see the changes. Also, if you want to see any of the images, especially diagrams, on this website in a larger format, you can. If you are using Firefox or Internet Explorer, right-click on the image and select "view image..." If you are using Chrome, right-click on it and "open image in new tab..." I will start here with the hands, but I will only show building one of them since they are symmetric.
I first started by printing the fingers. I discovered that in Gael's design each link of a finger was in two vertically printed pieces meant to be glued together using only butt joints, the weakest joint possible. I also saw that there were variations out there for the finger segments that were done in one-piece links. I chose to implement the one-piece variations of the fingers even though this sacrifices the way Gael did his fingertip pressure sensors for now. Likewise, throughout the InMoov build, Gael broke up various larger pieces so that they would fit in a small build volume, allowing those with smaller printers to participate, a nice idea. As a result, many of the larger pieces are glued-up from smaller ones using acetone if you are printing in ABS, or epoxy if you are printing PLA. Alternatively, there are one-piece versions of the some of the larger InMoov parts. My printer (an Autotroph AUTO1) has a larger build volume, so I will probably print the larger versions where it makes sense, and note that here. For the fingers, I used the "InMoov All Fingers (and Thumb) in 3 parts" variation by animatormatthew. (Note that parts like that are referenced by the title of the Thingiverse object in quotes - search on that, followed by the contributor's Thingiverse username.) My finger segments were printed horizontally for strength, which required support. However, removing that support leaves a slightly rough surface that needs to be cleaned up. Since the strength of a printed part is roughly twice as strong when printed horizontally than vertically, it is worth it - I traded off a bit of looks for strength. However, using the one-piece finger links meant getting the ligament or tension line (see the materials page for more about it) through the fingertip was a bit of a problem, until I tried a two step process. I bent a small stiff wire in a hook shape and worked it around the fingertip holes until it came out the other side, shown in Figure 2. I then closed the end of the hook around the line and was able to pull the wire and line out as shown on the right in Figure 3. The short end of the line was then pulled out, leaving the desired loop in the fingertip. From then on, the line was routed through the holes (keeping top and bottom holes consistent) until it was time to attach it to the palm. You can also see that I labeled each part as they came off the print bed, as it is easy to get them mixed up. Whenever you have any trouble feeding the ligament through holes the parts, you can always fashion a type of needle out of a piece of wire by making a shaped eye to feed it through. The ligament is supposed to be anchored on the figertip such that it will not slip under use, although there is not much force wanting to do so. This was done by wedging a short piece of 1.75mm filament into both holes where the ligament enters the tip, with a drop of CA glue on the filament to keep the ligament from moving.
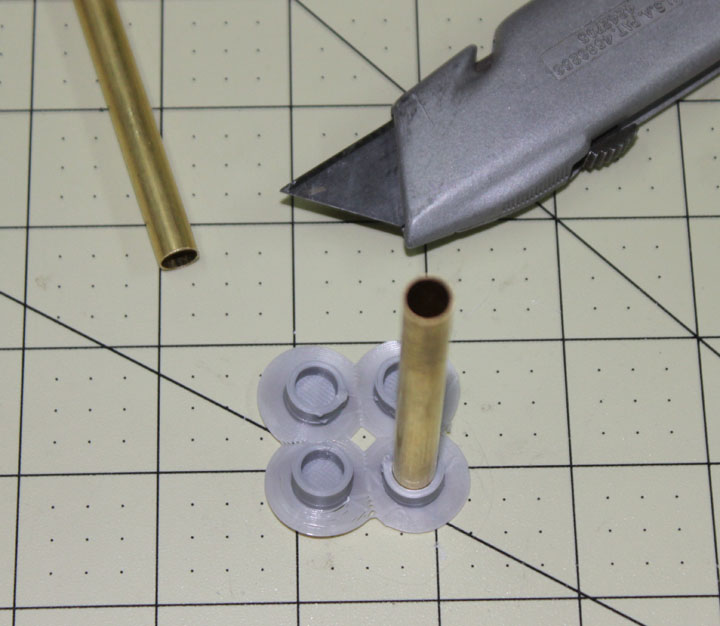
Fig. 4 A another example of building it a bit differently is the hinge joints for the fingers. The nominal instructions call for a piece of 3mm filament be used for the hinge pin, or a 3mm bolt with its head cut off. Wanting the fingers to have a smooth movement and a stronger joint, I used two pieces of telescoping brass. I used K&S #1145, which is 1/8 inch (3.18mm) OD for the bearing tube, and K&S #1161 which is 3/32 inch (2.38mm) solid rod for the axle that fits inside the bearing tube perfectly. (See the materials page for more.) Just a few bucks of the brass material is enough for both of the hands. The tubing material is thin, and is best cut by placing it along a ruler to determine the correct length, and then rolling it under a sharp utility knife while pressing down to score the tubing all around its circumference. Then, by placing the rod into the tube just short of the scored line, it easily snaps apart without crushing the tube. If needed, the cut end of the tube can be dressed with a file and manually twirling a drill bit on the end. The length of the bearing tube should be slightly less than the width of the inside finger joint to be hinged, and the length of the axle rod is also slightly less that the total width of the printed joint. Before measuring this, however, I found that I needed to file the sides of the PLA joints to make a good fit that caused no stress on the parts, and made a joint that had no side-to-side play in it. Using the brass this way is a bit more work, but makes a much better joint. The inside finger joint is drilled to the OD of the tube (1/8 inch) and is held in place with a dab of CA glue. The axle is then press fit into the printed hole on one side of the joint, slipped into the bearing tube, and press fit into the other side of the joint. Even though the joint is designed for a 3mm fit, and the axle is 2.38 mm, I found that drilling out the hole for the axle with a 3/32 bit before placing the axle worked well. A small dab of E6000 (see materials page) was put on the end of each axle to prevent it from working loose, but I am not at all sure that was needed. If need be, the axle can be easily punched out for disassembly. Many of the joint surfaces in InMoov are a bit oversized, so they must be prepared before gluing or fitting to make a smooth moving articulated joint. I found that preparing the finger joints means using a sharp unclogged flat file to remove just a bit of material at a time in order to "sneak up on" the right fit. This meant a few passes, like 4 or 5 swipes of the file while keeping it as straight as possible, and then making a trial fit, then repeat will give you enough control to eventually arrive at a good fit. Sandpaper did not work very well because it generated too much heat and gummed up, while the metal file remained cool. Sometimes a rotary tool with a grinder bit in it would work set on a very low speed, but any power tool takes some measure of control away from you, so use them sparingly.
Fig. 5 Here is a shot of the assembled index finger being attached to the right hand using the same brass rod and tubing as before. The palm (metatarsal) joints are also a bit different than the plans as well, and are described below.
Fig. 6 Three rather long 8mm cap head bolts are suggested in the hand that would make it quite heavy, or using printed bolts would be a bit weak. I replaced the 8mm bolts for the hands and wrists (as well as in the neck shown later) with brass tubing. I used 5/16 (or 7.94mm - pretty close) OD inch brass tubing (K&S #8133 and printed some end caps that may either be press fit or CA glued onto the tubing ends. I did the end caps in OpenSCAD, and they are small enough that they have a bit of trouble sticking on the first layer, so I found a brim helped. I print them 4 at a time, as shown above and I cut the brim off easily with some small scissors. Drilling out the joint holes to 5/16 and applying some lube makes for a strong, light, tight fitting but smooth operating joint. The end caps may be CA'ed, but I found they already had a nice press fit. The file to print these caps is on the download page.
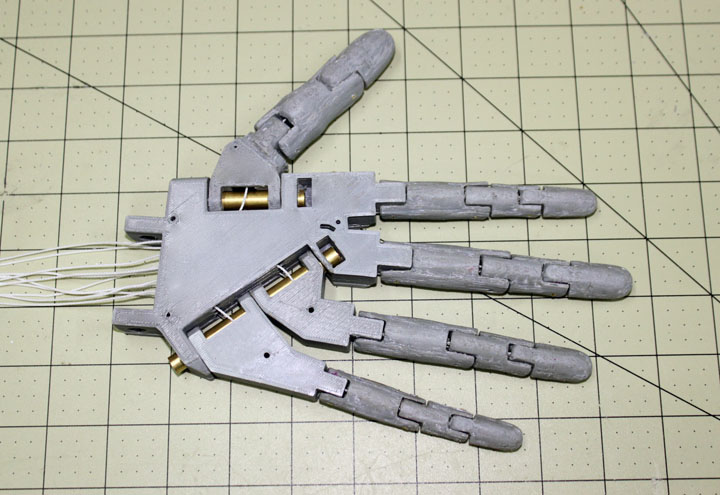
Fig. 7 Here all the fingers are in place on the right hand, with the "ligament" lines in place. All of the thumb and fingers have the brass rod/tubing joints. You must be careful to be consistent to keep the upper lines from not crossing the lower lines. One of the caps shown in Figure 6 still needs to be placed on the end of the brass tube on the bottom. There is room for an end cap to slip into the slots at the inner end of the tubing, but I found the fit to be quite good enough that I doubt the tubing will work loose. If it does, I can always slip one in later.There is a modified version of the thumb that provides another degree of freedom, although the movement is a manual adjustment. It looked like not much return for the effort to me, so I will wait to see how it might be needed later - it looks like a simple swap out of the thumb base when the time comes.
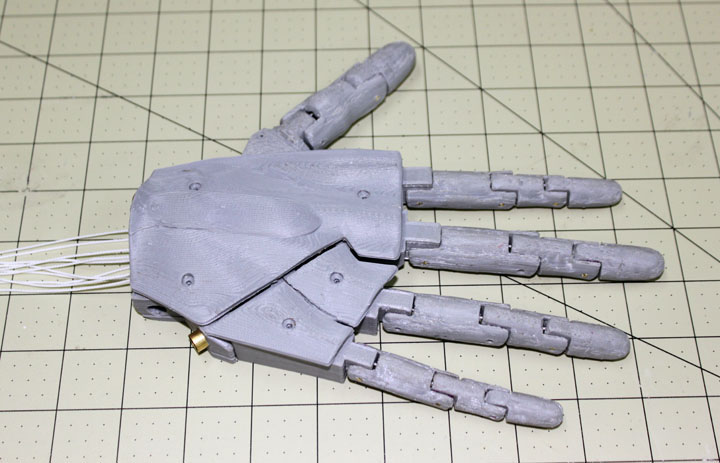
Fig. 8 Here is the hand shown with some of the back cover pieces in place - they will be bolted on using some 3mm cap head screws. There still needs to be some covers glued onto the bottom link of each finger, but I will wait to do that when I know the range of motion of the fingers better. These covers go a long way toward making the hand a bit more organic looking than that in Figure 7, but the finger covers also play a role in setting the open stop position for each finger (see Gael's link here.) The back cover shown is not the nominal one with the logo, but a plainer variation ("InMoov Top Surface (no logo)" by Geoffro) that is available. I had trouble slicing the nominal version correctly. Although only the right hand one is provided, using the mirror function in Cura gets you a left one.
Fig. 9 Here both hands are nearly complete and ready for mounting on the forearms. The wrist brackets are also in place using the same brass tubing as above.Comments may be directed to gary at liming daught org. Thanks for viewing this build log! Unless otherwise noted, the content of this website is copyright 2015 by the author |
||||






{kind=link}